
Ho deciso di iniziare il progetto di un quadricottero (chiamato 4ld): in questa serie di post potrete seguire passo-passo la sua costruzione e i suoi (speriamo ;)) voli. Non sono assolutamente un esperto: leggendo i miei post potrete quindi imparare con me!
Introduzione
Un multirotore è un modello volante radiocomandato che vola grazie a due o più motori. Non mi dilungherò qui sulla teoria che consente a tali modelli di volare: esistono su Internet ottimi siti che spiegano nel dettaglio il principio di Bernulli… per gli amici italiani, consiglio assolutamente la lettura del documento Multirotori 101, scritto e mantenuto aggiornato dagli utenti del forum di BaroneRosso.

Diverse configurazioni sono possibili: trirotori (con 3 motori e 3 eliche), quadrirotori (4 motori e 4 eliche)… anche la posizione dei motori e in generale la forma dei multirotori può variare da modello a modello.
Sul mercato è possibile trovare multirotori già pronti per il volo (RTF, ready to fly) oppure acquistare tutti i componenti per costruirne uno da zero… da buon maker ho optato per questa seconda possibilità.
Componenti
Un multirotore è formato da alcuni elementi principali:
[checklist]
- il frame, ovvero la struttura (in plastica, fibra di carbonio…) che sostiene gli altri elementi
- le eliche (propellers), che muovendo l’aria sostengono in volo il multirotore
- i motori, che fanno ruotare le eliche
- gli ESC (electronic speed control), circuiti elettronici che “comandano” i motori
- una flight control board, ovvero la scheda elettronica che fa da “cervello”… le control board più semplici ricevono i comandi dall’utente e li traducono per gli ESC; quelle più avanzate stabilizzano il multirotore tramite sensori e possono anche volare in autonomia grazie al GPS
- la ricetrasmittente formata dalla trasmittente in mano all’utente e dalla ricevente a bordo del multirotore e collegata alla control board
- la batteria che fornisce la corrente ai vari elementi
[/checklist]
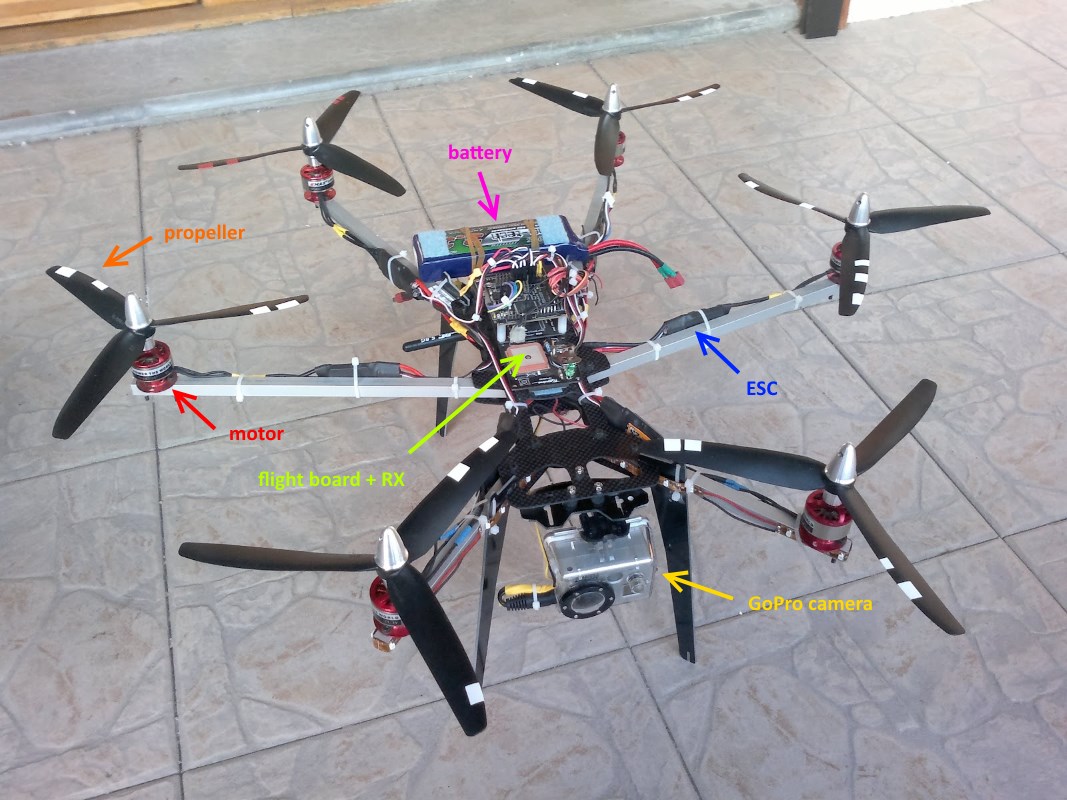
A questi componenti base, si possono aggiungere poi circuiti per la telemetria, videocamere (ad es. la famosa GoPro) con relativo gimbal per stabilizzarle, sistemi di FPV (first-persion vision)…
Lista della spesa

Ecco i componenti del mio quadricottero:
- Black Quadrotor KIT da RCTimer
Il kit comprende frame, ESC, motori ed eliche per realizzare un quadricottero di “classe” 450 (distanza in mm tra motori opposti). Il frame è un clone dell’ottimo Flame Wheel 450 di DJI.
- Ricetrasmittente Turnigy 9X Mode2 da HobbyKing
Ricetrasmittente a 9 canali (8 disponibili sulla ricevente) economica e molto utilizzata in ambito hobbistico. Mode2 indica la configurazione degli stick (semplificando il gas sta a sinistra come per gli automodelli).
- Flight control Naza-M Lite con GPS
Sebbene esistono soluzioni opensource per il controllo di multirotori, ho preferito affidarmi ad una flight control board commerciale per iniziare.
Appena arriverà tutto il materiale, potrò iniziare la costruzione, stay tuned!




Grande lucaa,a breve acquistero anche io tutto il materiale per construirne uno.
Ciao! Complimenti per l’iniziativa, non vedo l’ora di seguire i tuoi progressi !
Ciao e grazie mille.
Luca
Bravissimo Luca! Ti seguo volentieri, i tuoi tutorial sono come sempre chiarissimi! In Internet cercavo un tutorial sull’ autocostruzione di un drone, ma sono tutti confusi e incompleti.
Stai facendo un grandissimo lavoro! Anch’io come te sono un gran appassionato di Arduino, piattaforma fantastica
Ciao
Luca