
Let’s finish building up our mini quadcopter with the installation and configuration of the flight control board.
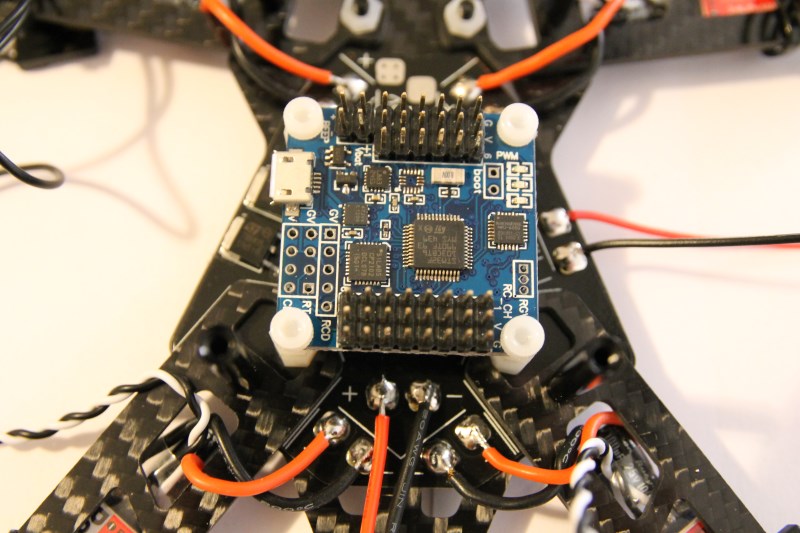
I mounted the Flip32 board on its plastic spacers, using plastic screws to fix it and avoid short circuits. Then I connected the cables from the ESCs to the connectors labeled M1/M2/M3/M4 (the number that corresponds to each motor is detailed in the manual and I also wrote it on the sheet of paper beneath the quadcopter) and the receiver.
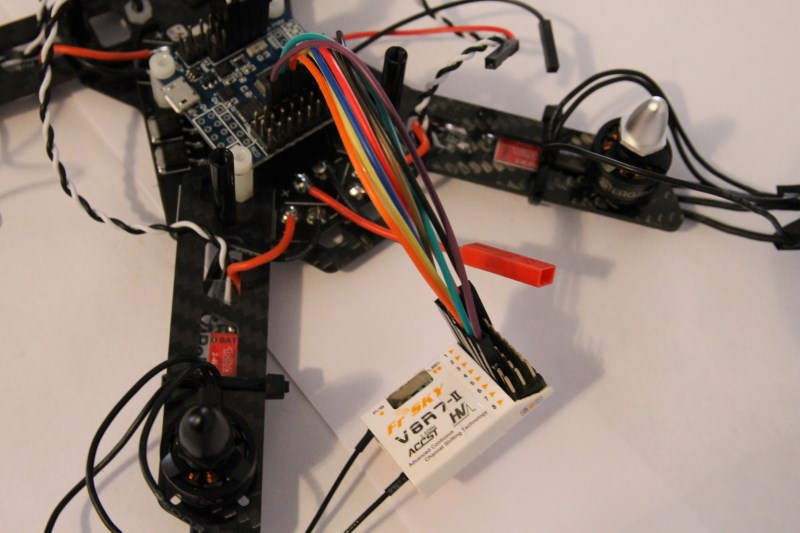
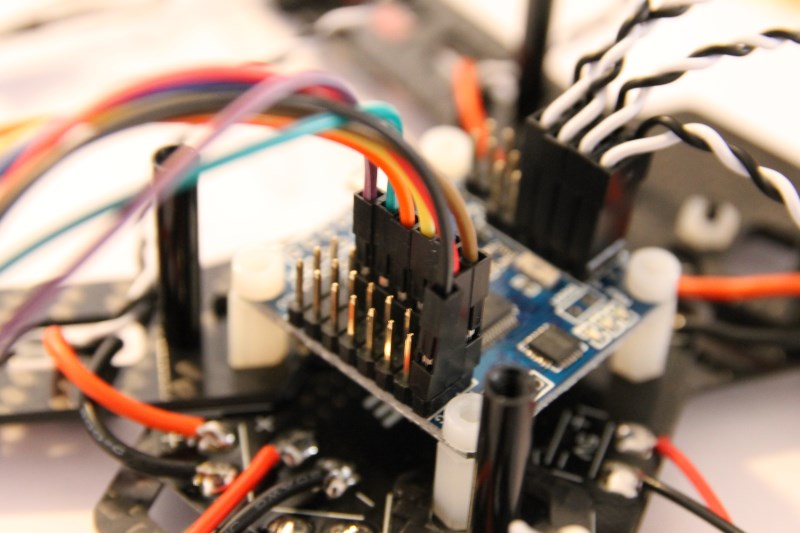
My receiver (a FrSky V8R7-II) has 8 channels but for now I connected only 6. It’s enough to connect ground and power signals for only one channel, as you can see in the photo:

After having connected the Flip32 to my PC using an USB cable, I uploaded the Cleanflight firmware and configured it using the Cleanflight Configurator Chrome app:
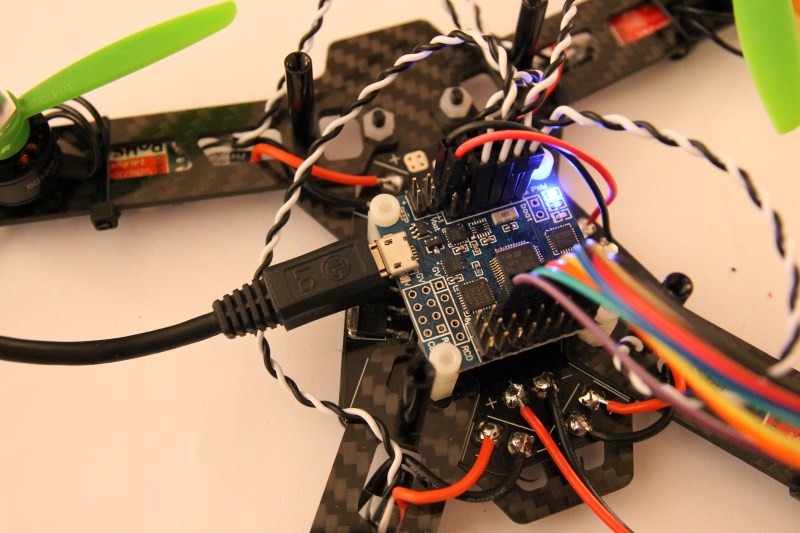
When I was sure that everything was ok, I soldered the cables from the ESCs to the motors and covered them with some shrinking tube. I also completed the assembly of the frame (with the upper plate) and mounted receiver and battery:

And here are a couple of videos about the final setup and the first flight!

