
Sabato pomeriggio ho avuto un po’ di tempo per procedere al montaggio del mio quadricottero…
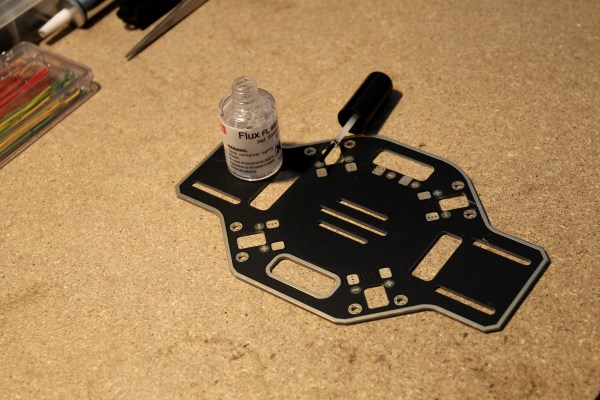
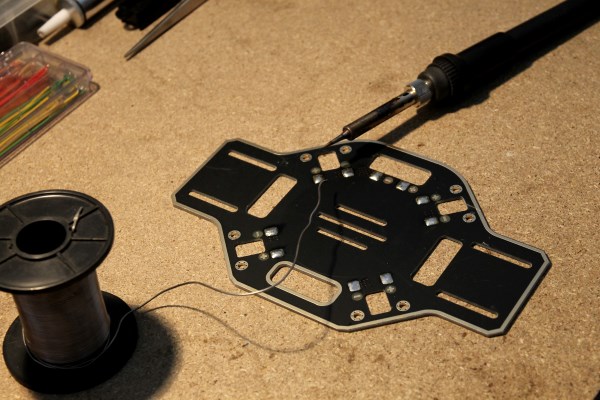
Per prima cosa, ho stagnato (aiutandomi con qualche goccia di flussante) i pad già predisposti sul supporto inferiore:
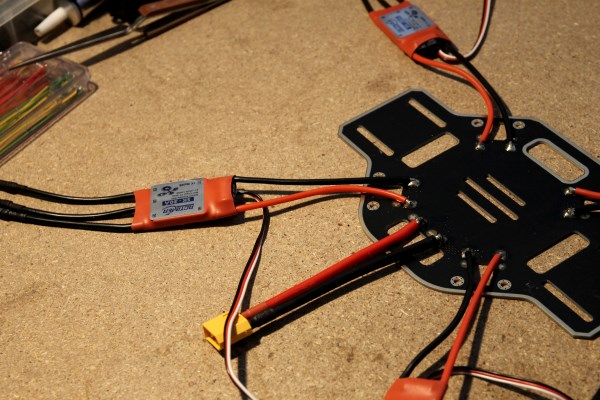
quindi ho saldato (rispettando la polarità come da serigrafia: cavo rosso = +) i 4 ESC e il connettore femmina (XT60) per la batteria al litio:

agli stessi pad dove ho saldato il connettore per la batteria, ho saldato anche la versatile unit della Naza Lite:

Utilizzando le 16 viti da 7.5mm fornite, ho quindi avvitato i motori ai bracci plastici del quadricottero:


Con le viti da 6mm ho invece fissato i bracci al supporto inferiore:


I 4 ESC sono stati posizionati sotto i bracci grazie ad alcune fascette plastiche, quindi ho collegato i motori agli ESC:


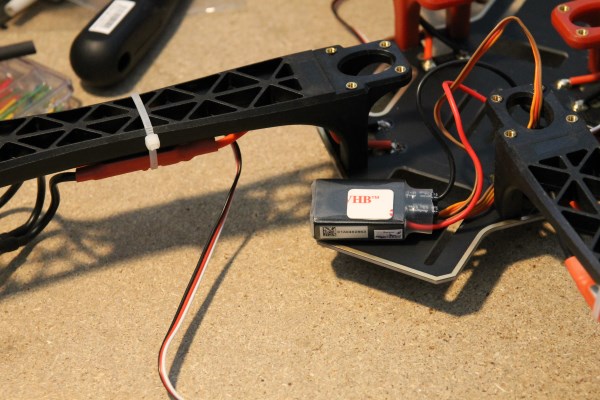
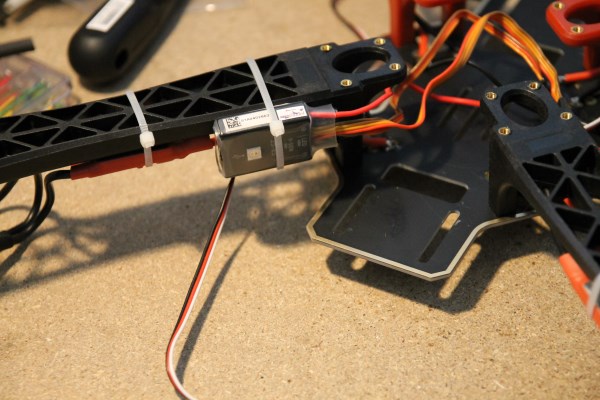
La versatile unit ha il compito di alimentare la flight control board, di visualizzarne lo stato tramite un LED e di fare da interfaccia USB verso il computer. Dopo aver applicato il biadesivo fornito insieme alla Naza, l’ho fissata ad uno dei bracci posteriori, con il LED ben visibile:
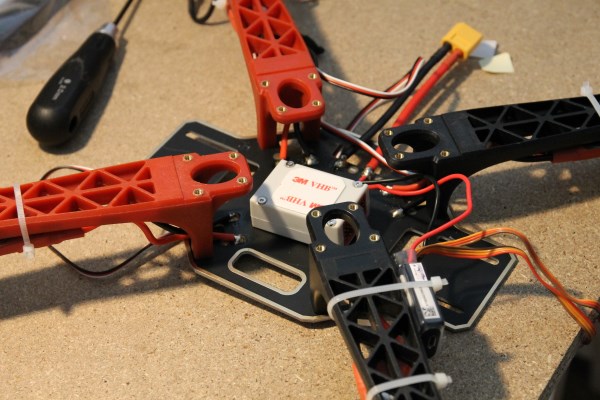
L’unità principale della Naza va posizionata quanto più possibile al centro del quadricottero e con la punta della freccia serigrafata sotto il logo ad indicare la direzione “avanti”. Anche l’unità principale è stata fissata al supporto inferiore del quadricottero usando il biadesivo fornito:

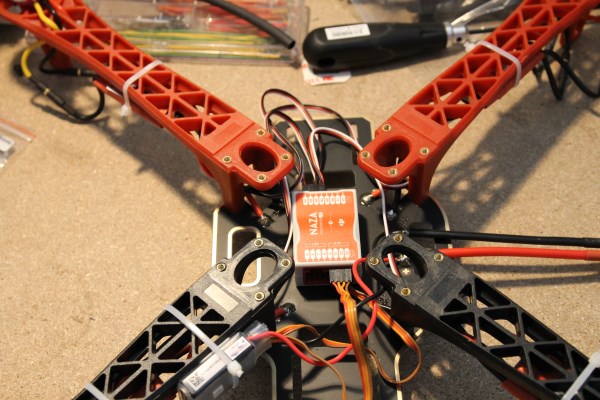
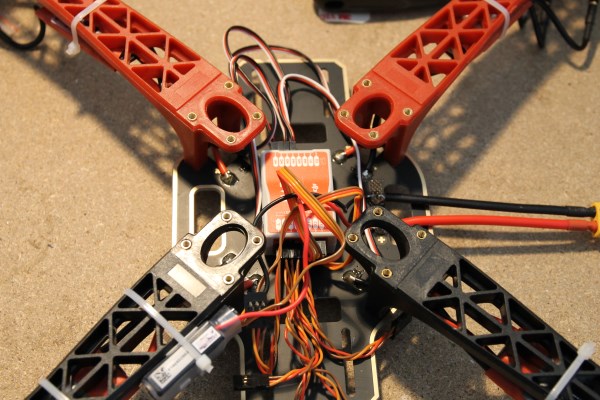
All’unità principale vanno collegati i motori, la versatile unit e la ricevente della radio. In attesa di avere la ricevente, ho collegato 5 cavetti inclusi nella confezione della Naza:
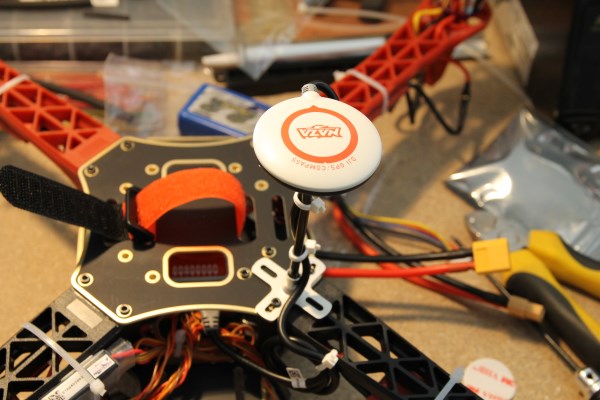
Infine ho avvitato il supporto superiore, posizionato la fascetta con velcro per fissare la batteria e installato il ricevitore GPS:

Galleria







