
Iniziamo oggi ad assemblare il kit di Banggood che costituirà la piattaforma robotica con cui giocheremo nei prossimi tutorial…
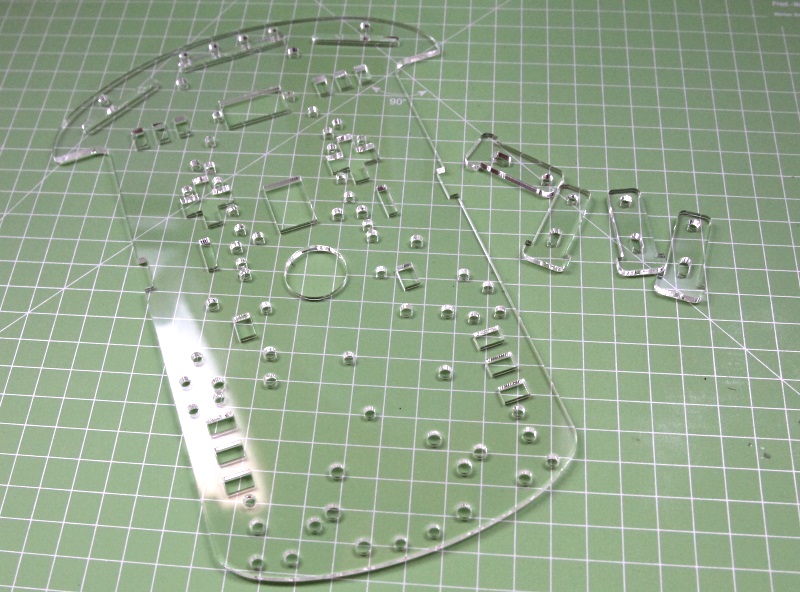
Prima di iniziare, rimuoviamo la pellicola protettiva dalle tutte le parti in acrilico:
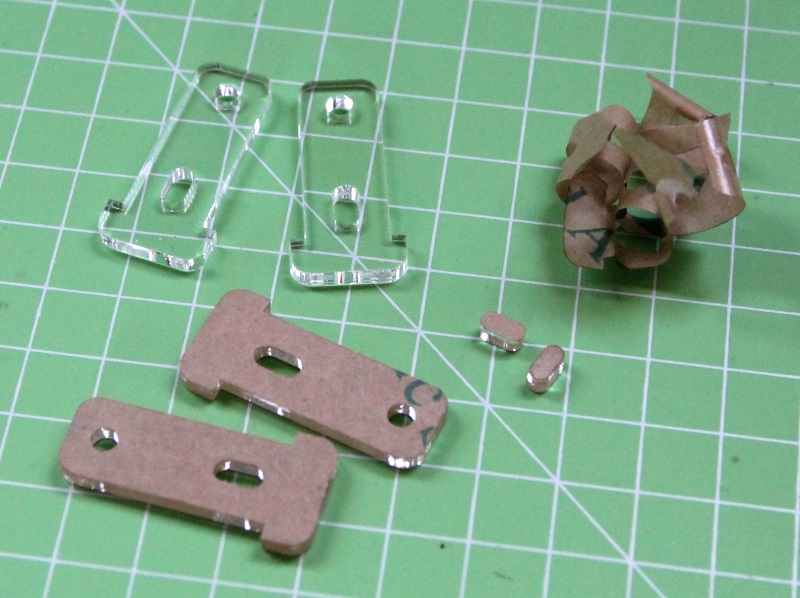
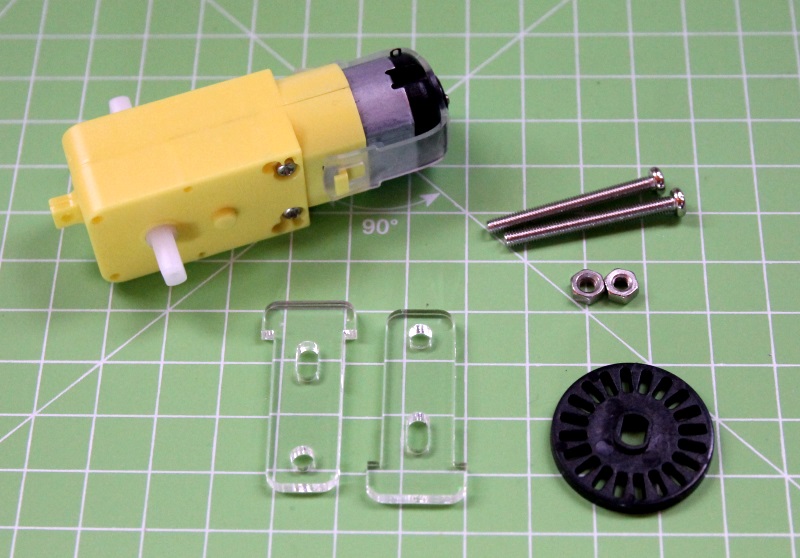
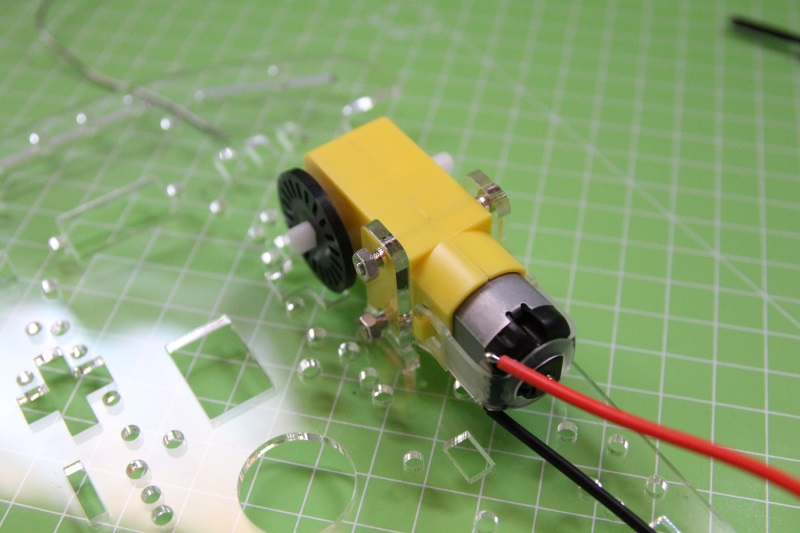
Montiamo il primo motore sullo chassis. Ci servono il motore, due viti con i relativi dadi, i due supporti in acrilico e la rotella plastica per l’encoder. Iniziamo inserendo la rotella sull’asse del motore e posizionando i due supporti nel relativi fori dello chassis:

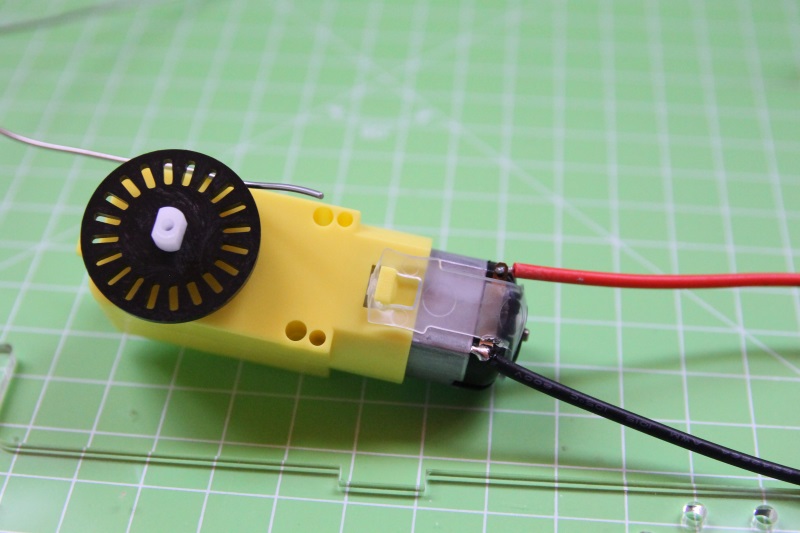
Per comodità possiamo saldare due fili (rosso e nero) al motore prima di montarlo sullo chassis. Fissiamo quindi il motore ai supporti tramite le viti e i dati, lasciando la rotella dell’encoder all’interno:
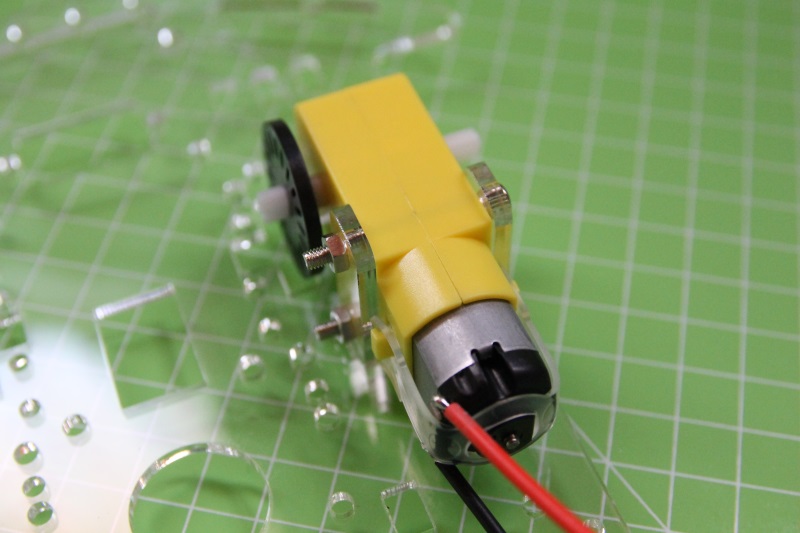
Aiutandoci con un cacciavite, stringiamo le due viti in modo che il motore sia ben fissato alla base:

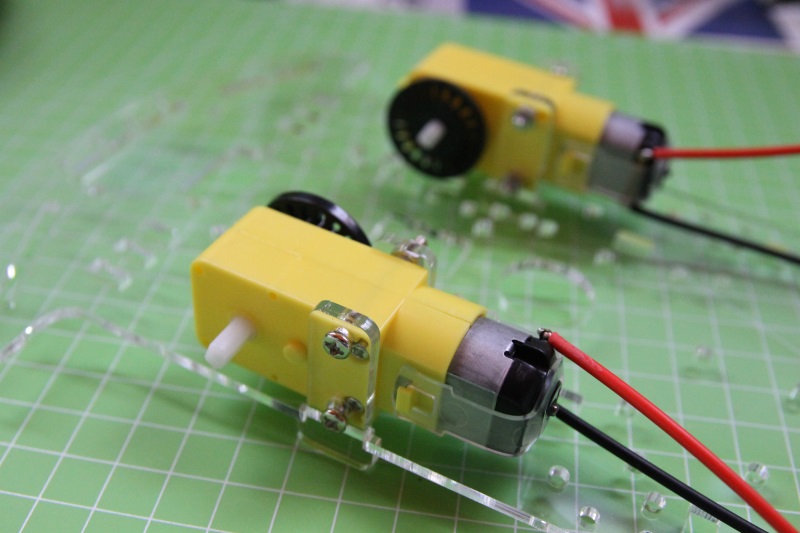
Montiamo allo stesso modo anche il secondo motore e assicuriamoci che la rotella dell’encoder possa girare liberamente, senza entrare in contatto con la base dello chassis:

Completiamo il montaggio inserendo le due ruote nei perni dei motori:


Passiamo ora al caster, ovvero alla ruota frontale. Il caster va montato alla base dello chassis tramite 4 viti e dati, utilizzando i fori già predisposti:


Terminato il montaggio, noterete che il caster è più basso delle ruote posteriori; il robot sarà quindi inclinato in avanti. Possiamo risolvere aggiungendo i 4 distanziatori tra il caster e la base:


Ecco il risultato finale:




